File list
This special page shows all uploaded files.
First page |
Previous page |
Next page |
Last page |
| Date | Name | Thumbnail | Size | Description | Versions |
|---|---|---|---|---|---|
| 09:39, 31 January 2011 | Nao whitebg.jpg (file) |  |
47 KB | Big, full frontal image of Nao taken from http://www.neuroinformatik.ruhr-uni-bochum.de/thbio/group/robotic/index.html | 1 |
| 09:15, 1 February 2011 | Nao web interface.jpg (file) |  |
139 KB | 3 | |
| 09:22, 2 February 2011 | Aldebaran downloads website.jpg (file) |  |
71 KB | Picture of the "Software/Download" section of Aldebaran's user site. | 1 |
| 09:36, 2 February 2011 | Aldebaran official documentation.jpg (file) |  |
68 KB | Picture of Aldebaran's official documentation site. | 1 |
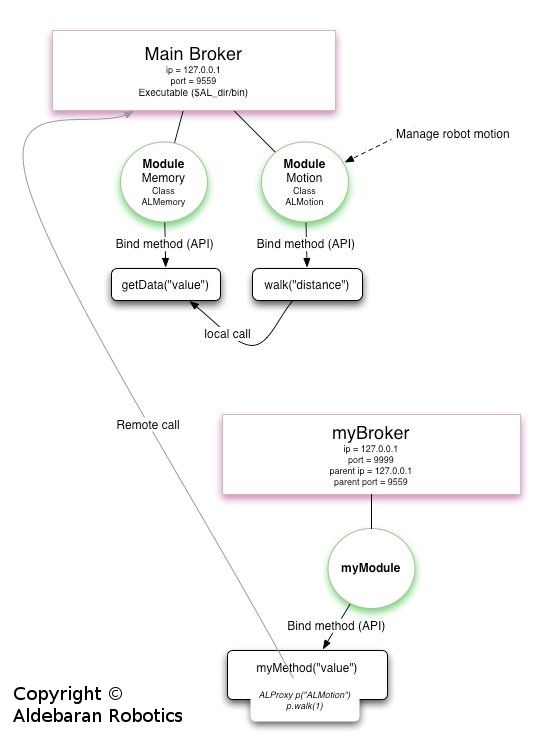
| 08:51, 3 February 2011 | Brokers and modules.jpg (file) |  |
80 KB | Example graph of how brokers and modules work in Nao. Image taken from the official documentation of Aldebaran Robotics. | 1 |
| 09:31, 8 February 2011 | Ccmake GUI.jpg (file) |  |
241 KB | Screenshot of Ccmake's GUI while configuring a project for Nao. | 1 |
| 10:52, 14 June 2012 | Kinect.jpg (file) |  |
256 KB | Picture of a Kinect taken from http://static.clickbd.com/global/classified/item_img/271191_0_original.jpg | 1 |
| 08:11, 18 September 2012 | Synaptic Kinect lock.png (file) |  |
115 KB | Downgrading and locking the versions of openni-dev and ps-engine using Synaptic package manager, to make Kinect work on Ubuntu 12.04 32-bit. | 1 |
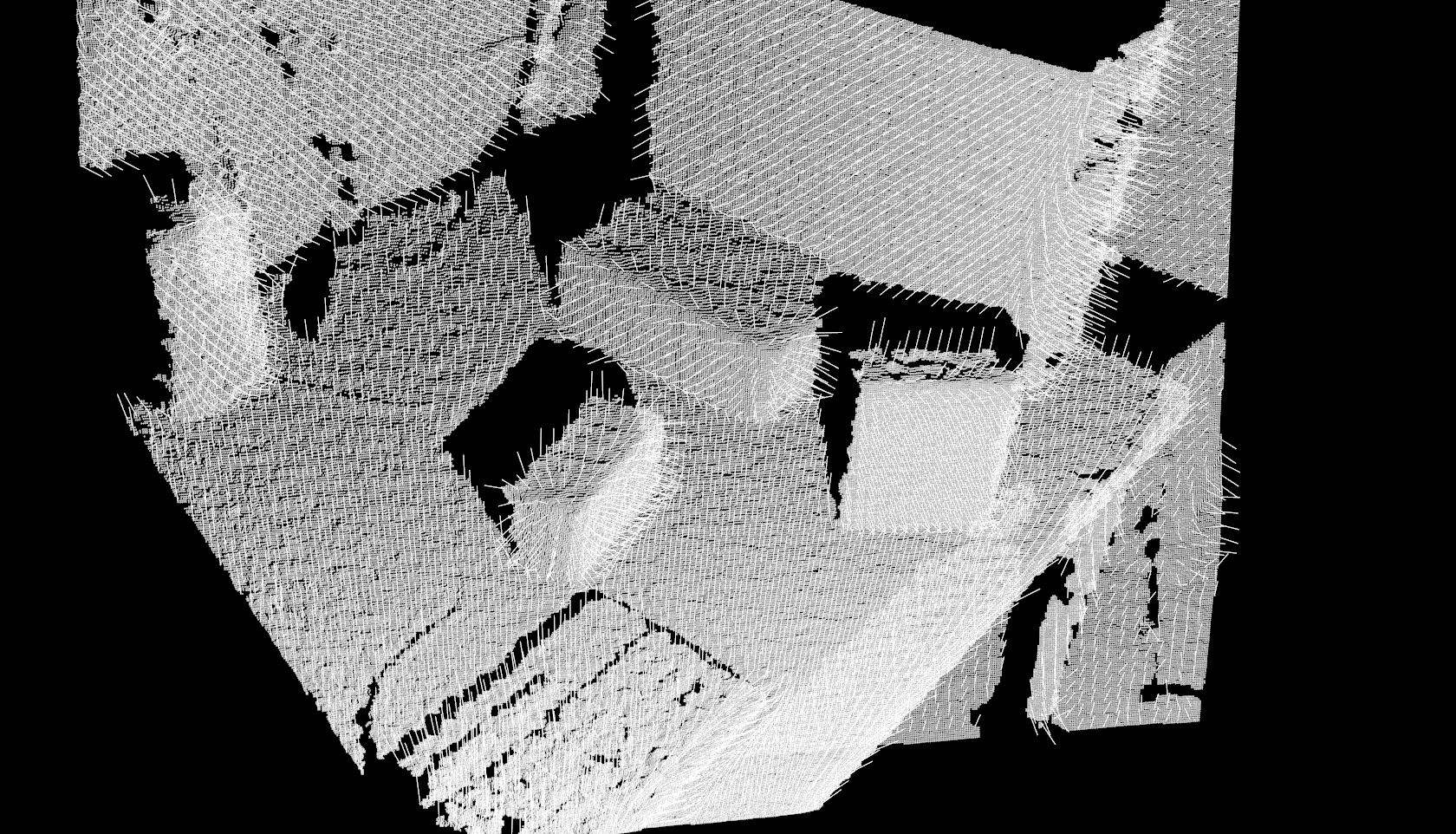
| 10:53, 27 November 2013 | Normal estimation.png (file) |  |
1,005 KB | Screenshot of the PCLVisualizer displaying the normals that have been computed for a point cloud of a desktop. | 1 |
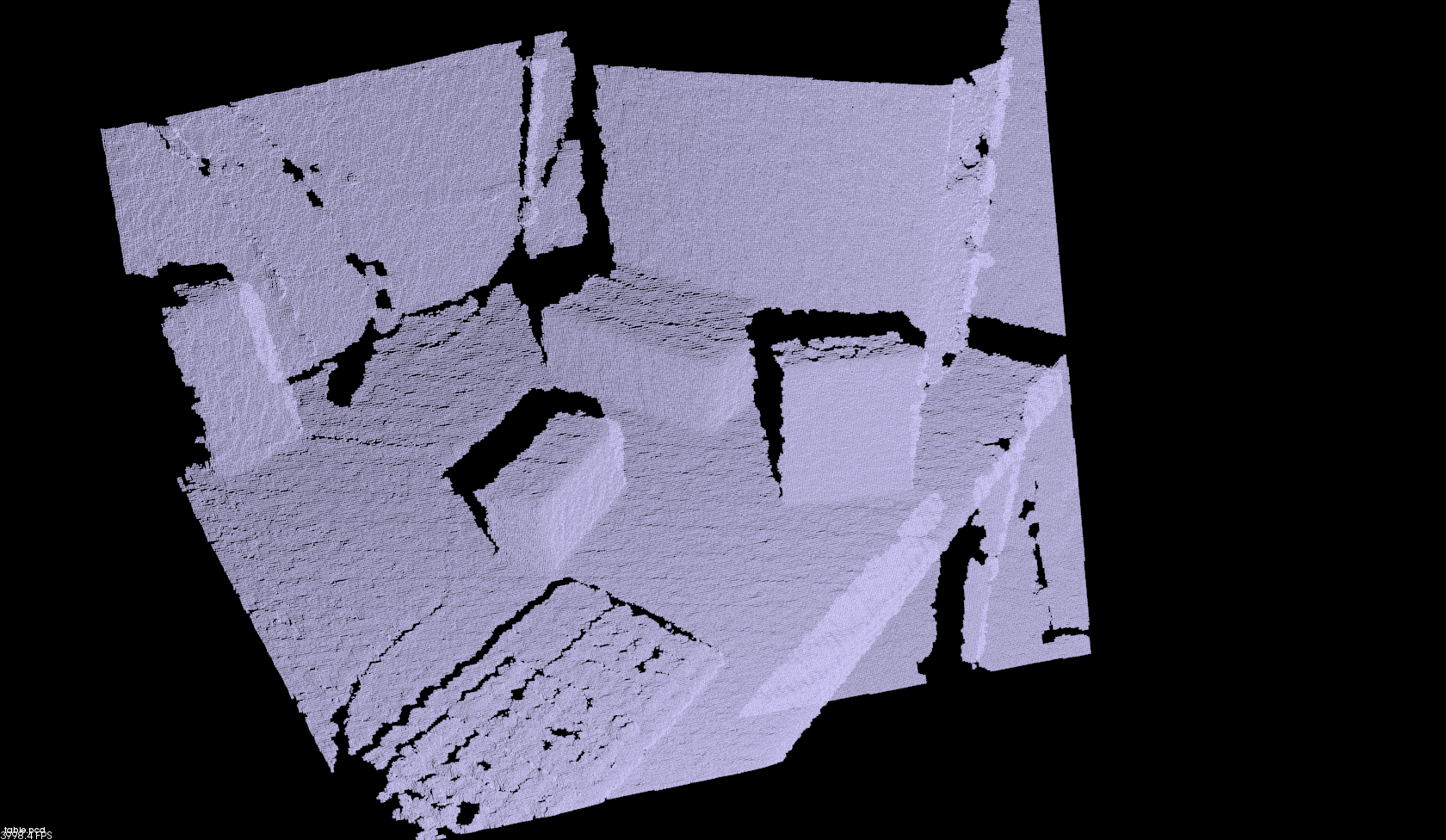
| 11:02, 27 November 2013 | Point cloud.png (file) |  |
855 KB | Visualization of a point cloud with the program pcl_viewer, depicting a desktop. | 1 |
| 12:28, 27 November 2013 | Kdtree.png (file) |  |
30 KB | Example of 2D kd-tree (image taken from Wikimedia Commons). | 1 |
| 10:21, 28 November 2013 | Octree.png (file) |  |
94 KB | Schematic drawing of an octree (image taken from Wikimedia Commons). | 1 |
| 12:20, 28 November 2013 | BeforeCompression.png (file) |  |
1.01 MB | Point cloud before undergoing octree compression. | 1 |
| 12:20, 28 November 2013 | AfterCompression.png (file) |  |
325 KB | Point cloud after undergoing octree compression. | 1 |
| 09:51, 2 December 2013 | AfterPassthrough.png (file) |  |
676 KB | Point cloud after applying a passthrough filter with Z[0,2]. | 1 |
| 09:51, 2 December 2013 | BeforePassthrough.png (file) |  |
1.38 MB | Point cloud before applying a passthrough filter with Z[0,2]. | 1 |
| 12:34, 2 December 2013 | BeforeDownsampling.png (file) |  |
677 KB | Point cloud before being downsampled with a leaf size of 1cm. | 1 |
| 12:27, 3 December 2013 | Stereo.png (file) |  |
1.78 MB | Example of stereo camera. | 1 |
| 09:36, 4 December 2013 | LIDAR.jpg (file) |  |
358 KB | Mobile robot with a SICK Laser Rangefinder (LIDAR) mounted for 3D perception (image from Wikimedia Commons). | 1 |
| 09:48, 4 December 2013 | ToFcam.png (file) |  |
459 KB | SwissRanger 4000 time-of-flight camera, by MESA Imaging (image from Wikimedia Commons). | 1 |
| 10:38, 4 December 2013 | Structured light.png (file) |  |
83 KB | Example of the pattern of infrarred light projected by Kinect. | 1 |
| 10:39, 4 December 2013 | Xtion.jpg (file) |  |
18 KB | Cropped. | 2 |
| 09:20, 5 December 2013 | AfterDownsampling.png (file) |  |
212 KB | 2 | |
| 10:28, 10 February 2014 | VTK.png (file) |  |
328 KB | VTK file produced by triangulation of a desktop scene, being visualized with the program ParaView. | 1 |
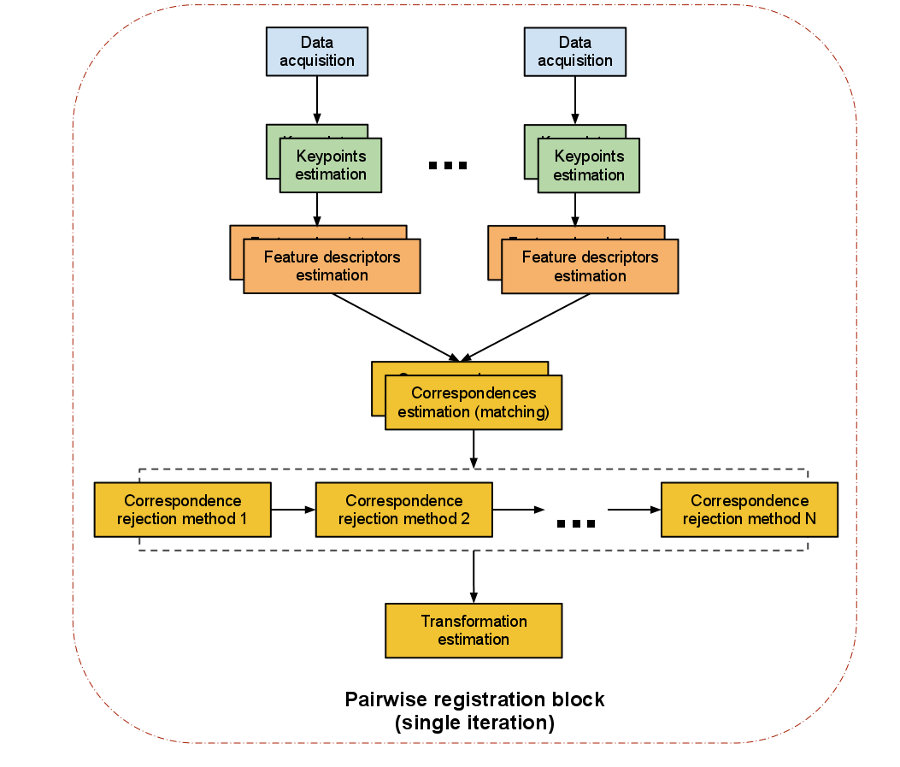
| 11:42, 10 February 2014 | Pairwise registration.jpg (file) |  |
89 KB | One iteration of the problem of pairwise registration, for point clound alignment (image taken from http://pointclouds.org/). | 1 |
| 11:11, 12 February 2014 | Registration after.png (file) |  |
220 KB | Two clouds shown one next to the other, before performing registration. | 1 |
| 11:12, 12 February 2014 | Registration before.png (file) |  |
187 KB | Two point clouds shown after performing registration. | 1 |
| 11:12, 12 February 2014 | Registration cloud1.png (file) |  |
142 KB | The source cloud used for the registration process. | 1 |
| 11:12, 12 February 2014 | Registration cloud2.png (file) |  |
135 KB | The target cloud used for the registration process. | 1 |
| 12:08, 13 February 2014 | EuclideanClusteringAfter.png (file) |  |
43 KB | Clusters recovered after performing Euclidean segmentation. | 1 |
| 12:08, 13 February 2014 | EuclideanClusteringBefore.png (file) |  |
110 KB | Original cloud before performing Euclidean segmentation. | 1 |
| 09:13, 18 February 2014 | RANSAC before.png (file) |  |
66 KB | A set of 2D data points containing both outliers and inliers fitting a line model (image from Wikimedia Commons). | 1 |
| 09:14, 18 February 2014 | RANSAC after.png (file) |  |
96 KB | A set of 2D data points containing both outliers and inliers fitting a line model, after applying RANSAC to find said line (image from Wikimedia Commons). | 1 |
| 10:36, 21 February 2014 | ConcaveHull.png (file) |  |
38 KB | Example of a concave hull for a set of points. | 1 |
| 10:37, 21 February 2014 | ConvexHull.png (file) |  |
33 KB | Example of the convex hull for a set of points. | 1 |
| 10:49, 21 February 2014 | ConcaveHullBefore.png (file) |  |
113 KB | Point cloud scene of a table with an object on top, taken from the PCL dataset (https://github.com/PointCloudLibrary/data/blob/master/tutorials/table_scene_lms400.pcd). | 1 |
| 10:50, 21 February 2014 | ConcaveHullAfter.png (file) |  |
12 KB | Concave hull computed for the table at https://github.com/PointCloudLibrary/data/blob/master/tutorials/table_scene_lms400.pcd | 1 |
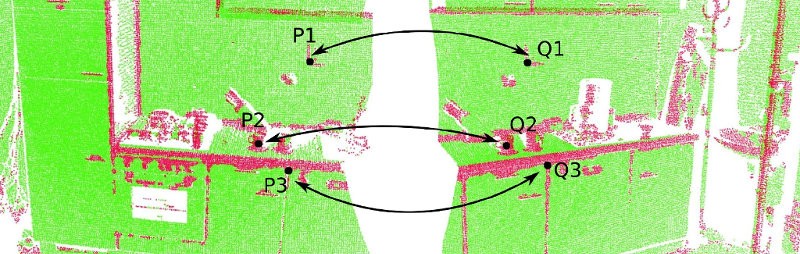
| 11:55, 25 February 2014 | Correspondence.jpg (file) |  |
94 KB | 3 point feature correspondences found between two clouds (image taken from http://pointclouds.org). | 1 |
| 11:40, 27 February 2014 | PFH frame.png (file) |  |
26 KB | Fixed coordinate frame and angular features computed for a pair of points, for the FPH descriptor (image taken from http://pointclouds.org). | 1 |
| 12:14, 4 March 2014 | FPFH neighbors.png (file) |  |
46 KB | Example of how the point pairs that are computed for the FPFH descriptor (image taken from http://pointclouds.org). | 1 |
| 12:15, 4 March 2014 | PFH neighbors.png (file) |  |
17 KB | Example of how the point pairs that are computed for the PFH descriptor (image taken from http://pointclouds.org). | 1 |
| 09:22, 5 March 2014 | RSD sphere.png (file) |  |
14 KB | Sphere that fits two points with given normals, computed for the RSD descriptor (image taken from http://ias.in.tum.de/_media/events/rgbd2011/marton.pdf). | 1 |
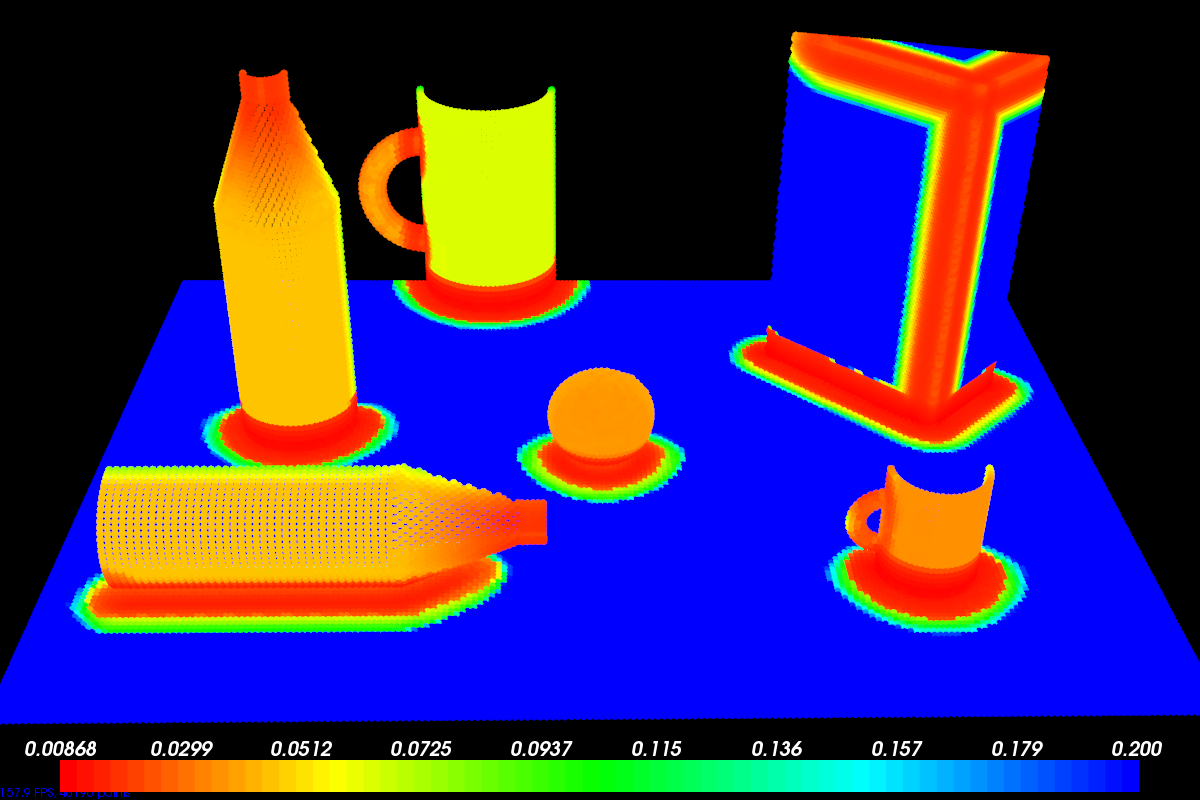
| 09:23, 5 March 2014 | RSD values.png (file) |  |
204 KB | Values of RSD descriptor for the points of a cloud. Points lying on a flat plane have the maximum possible sphere radius, points lying on a sphere or cylinder have the actual radius of the object (image taken from http://ias.in.tum.de/_media/events/rgb... | 1 |
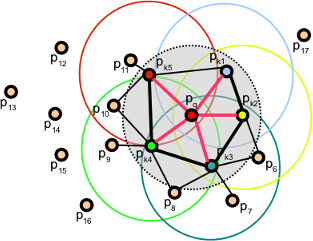
| 11:33, 5 March 2014 | 3DSC support structure.png (file) |  |
287 KB | Support structure (sphere) used to compute the 3D Shape Context descriptor on a point, showing the division into bins (image taken from original paper by Andrea Frome et al.) | 1 |
| 09:57, 11 March 2014 | SHOT support structure.png (file) |  |
48 KB | Support structure (sphere) used to compute the Signature of Histograms of Orientations descriptor on a point, showing the division into bins. Only 4 azimuth subdivisions are shown for clarity, 8 are actually used (image taken from original paper by Fed... | 1 |
| 12:43, 11 March 2014 | Spin images.png (file) |  |
218 KB | Example of spin images computed for 3 different points of a 3D model (image taken from thesis of Andrew Edie Johnson). | 1 |
| 12:24, 12 March 2014 | RIFT.png (file) |  |
58 KB | Computation of the Rotation Invariant Feature Transform (RIFT) descriptor, showing the resulting features at three points (image taken from [http://www.cs.illinois.edu/~slazebni/publications/pami05.pdf original paper]). | 1 |
| 12:38, 20 March 2014 | Range image spherical.png (file) |  |
212 KB | Range image created from a point cloud, using spherical projection. | 1 |
| 12:38, 20 March 2014 | Range image planar.png (file) |  |
168 KB | Range image created from a point cloud, using planar projection. | 1 |
| 11:02, 21 March 2014 | Range image border detection.png (file) |  |
243 KB | Example of border detection on range images (image taken from [http://www.willowgarage.com/sites/default/files/icra2011_3dfeatures.pdf original paper] by Bastian Steder et al.). | 1 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
First page |
Previous page |
Next page |
Last page |