File list
This special page shows all uploaded files.
First page |
Previous page |
Next page |
Last page |
| Date | Name | Thumbnail | Size | Description | Versions |
|---|---|---|---|---|---|
| 12:21, 23 February 2015 | PCL plotter VFH.png (file) |  |
31 KB | Using the Plotter class to plot a VFH descriptor in PCL. | 1 |
| 16:48, 14 December 2014 | Prism scene after.png (file) |  |
81 KB | Segmenting points sitting on a table (the mug) using the polygonal prism class. Some residual points can be seen too. | 1 |
| 16:47, 14 December 2014 | Prism scene before.png (file) |  |
508 KB | Original scene of a mug sitting on a table, before segmenting points lying on it using the polygonal prism class. | 1 |
| 18:18, 6 December 2014 | PCL upsampling local plane.png (file) |  |
443 KB | Cloud after upsampling with the method SAMPLE_LOCAL_PLANE, using an upsampling radius of 3cm and a step size of 2cm. | 1 |
| 17:57, 6 December 2014 | PCL upsampling uniform density.png (file) |  |
478 KB | Cloud after upsampling using RANDOM_UNIFORM_DENSITY method, with a target point density of 300 per 3cm radius. | 1 |
| 17:54, 6 December 2014 | PCL upsampling downsampled.png (file) |  |
160 KB | Cloud, depicting a table with a coffee mug on top, after downsampling with a voxel size of 1cm. | 1 |
| 17:53, 6 December 2014 | PCL upsampling original.png (file) |  |
682 KB | Original cloud before downsampling, depicting a table with a coffee mug on top. | 1 |
| 18:33, 2 December 2014 | Virtual scanner tesselated sphere.png (file) |  |
1.13 MB | Representation of the use of a tesselated sphere to mark the positions of a virtual camera with which a 3D CAD model can be rendered, simulating the scanning of a real life object. The series of snapshots that this generates will be used for object tra... | 1 |
| 17:05, 2 December 2014 | Pcl mesh2pcd example result.png (file) |  |
129 KB | Example of the usage of pcl_mesh2pcd: point cloud after raytracing and downsampling. | 1 |
| 17:05, 2 December 2014 | Pcl mesh2pcd example original.png (file) |  |
87 KB | Example of the usage of pcl_mesh2pcd: original mesh before raytracing. | 1 |
| 19:25, 25 November 2014 | Ccmake GUI PCL.png (file) |  |
172 KB | Screenshot of CCMake (CMake's curses interface) being used to configure a trunk version of PCL 1.8, on Ubuntu 14.04.1. | 1 |
| 08:16, 18 June 2014 | Kinect2.png (file) |  |
103 KB | Image of the Kinect 2 taken from http://www.microsoft.com/. | 1 |
| 11:23, 23 May 2014 | Hough voting pipeline.png (file) |  |
22 KB | Use of the Hough voting scheme (red blocks) in a 3D object recognition pipeline (image from [http://vision.deis.unibo.it/fede/papers/psivt10.pdf original paper] by Federico Tombari and Luigi Di Stefano). | 1 |
| 10:52, 12 May 2014 | Pan tilt unit.jpg (file) |  |
37 KB | Pan-tilt unit that allows to take snapshots of small objects from any angle, useful for training a 3D recognition system (image from http://pointclouds.org/). | 1 |
| 09:04, 9 May 2014 | 3D recognition pipeline.png (file) | 146 KB | Example of local and global 3D recognition pipelines in PCL (image from [http://www.inf.ethz.ch/personal/zeislb/publications/aldoma_2012jram_PCLTutorial.pdf this paper] by Aitor Aldoma et al.). | 1 | |
| 09:28, 28 April 2014 | PCL viewer VFH.png (file) |  |
32 KB | VFH histogram being plotted by the PCL application pcl_viewer. | 1 |
| 09:01, 28 April 2014 | Histogram visualizer VFH.png (file) |  |
23 KB | Using the HistogramVisualizer class to plot a VFH descriptor in PCL. | 1 |
| 08:53, 24 April 2014 | Cloud transformation.png (file) |  |
382 KB | Result (red) of transforming a cloud (white) with a matrix containing a rotation and a translation. | 1 |
| 11:06, 10 April 2014 | GRSD.png (file) |  |
266 KB | Surface labelling for the GRSD descriptor: red is a sharp edge or noise, yellow is a plane, green is a cylinder, and dark blue is a rim (image taken from [https://ias.in.tum.de/_media/spezial/bib/grsd10humanoids.pdf original paper] by Zoltan-Csaba Mart... | 1 |
| 09:49, 9 April 2014 | OUR-CVFH.png (file) |  |
256 KB | Example of SGURF reference frame computed for a region of a wine glass, with the resulting histogram (image taken from [http://vision.deis.unibo.it/fede/papers/dagm12.pdf original paper] by Aitor Aldoma et al.). | 1 |
| 08:05, 2 April 2014 | GFPFH.png (file) |  |
977 KB | Usage of a voxel grid for the GFPFH descriptor. For every pair of leaves, a ray is casted, and all leaves in its trajectory are checked to see if they contain free or unoccupied space, reflecting this in an histogram (image taken from [https://www.will... | 1 |
| 07:59, 2 April 2014 | FPFH CRF.png (file) |  |
725 KB | Classifying the points of a cloud (dark green for handle/stem, lighter green for convex cylinders, and greenish-yellow for concave cylinders), using a Conditional Random Field (CRF) for the GFPFH descriptor (image taken from [https://www.willowgarage.c... | 1 |
| 10:45, 28 March 2014 | ESF.png (file) | 189 KB | Example of how the shape functions of the ESF descriptor are computed (image from [http://www.inf.ethz.ch/personal/zeislb/publications/aldoma_2012jram_PCLTutorial.pdf PCL tutorial paper]). | 1 | |
| 12:23, 26 March 2014 | CVFH regions.png (file) |  |
184 KB | Example of how the CVFH algorithm divides a clustered objet in further stable regions (image taken from [http://vpa2.sabanciuniv.edu/conferences/ICCV2011/ICCV2011_workshops/material/ws08_016.pdf original paper] by Aitor Aldoma et al.). | 1 |
| 12:22, 26 March 2014 | CVFH occlusion.png (file) |  |
232 KB | Example of a point cloud with typical occlusion artifacts (image taken from [http://vpa2.sabanciuniv.edu/conferences/ICCV2011/ICCV2011_workshops/material/ws08_016.pdf original paper] by Aitor Aldoma et al.). | 1 |
| 09:52, 26 March 2014 | VFH histogram.png (file) |  |
52 KB | Graphical visualization of a resulting VFH histogram, which is the concatenation of 4 different histograms (1 for the viewpoint component and 3 for the extended FPFH component) (image taken from [http://www.willowgarage.com/sites/default/files/Rusu10IR... | 1 |
| 09:49, 26 March 2014 | VFH extended FPFH component.png (file) |  |
98 KB | Calculation of the extended FPFH component of the VFH descriptor (image from [http://www.willowgarage.com/sites/default/files/Rusu10IROS.pdf original paper] by Radu Bogdan Rusu et al.). | 1 |
| 09:48, 26 March 2014 | VFH viewpoint component.png (file) |  |
85 KB | Calculation of the viewpoint component of the VFH descriptor (image from [http://www.willowgarage.com/sites/default/files/Rusu10IROS.pdf original paper] by Radu Bogdan Rusu et al.). | 1 |
| 11:50, 25 March 2014 | NARF descriptor.png (file) |  |
1.48 MB | Example of NARF descriptor (right) being computed on a keypoint from a range image (left). A start pattern is overlaid onto a local range patch, and the final descriptor encodes the amount of surface changes under each beam (image from [http://www.will... | 1 |
| 12:41, 21 March 2014 | NARF keypoints support sizes.png (file) |  |
145 KB | NARF keypoint interest regions that vary according to the support size: 20cm (up) and 1m (down) (image taken from [http://www.willowgarage.com/sites/default/files/icra2011_3dfeatures.pdf original paper] by Bastian Steder et al.). | 1 |
| 12:39, 21 March 2014 | NARF keypoints.png (file) |  |
656 KB | Example of NARF keypoints found on two objects (image from [http://www.willowgarage.com/sites/default/files/icra2011_3dfeatures.pdf original paper] from Bastian Steder et al.). | 1 |
| 11:47, 21 March 2014 | Range image borders example.png (file) |  |
831 KB | Example of object and shadow borders as seen on a point cloud. | 1 |
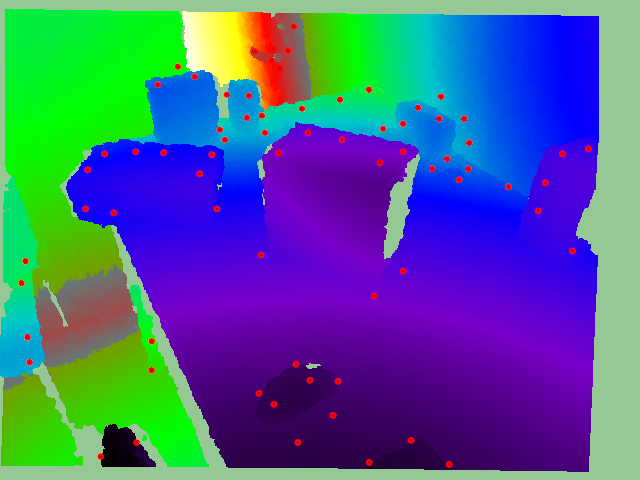
| 11:05, 21 March 2014 | Range image NARF keypoints.png (file) |  |
177 KB | NARF keypoints detected on a range image. | 1 |
| 11:05, 21 March 2014 | Range image border type.png (file) |  |
80 KB | Types of borders on range images. Obstacle borders correspond to the edges of objects, shadow borders to the edge of occlusions. Veil points are interpolated points between these two, a typical phenomenon in LIDAR scans (image taken from [http://www.wi... | 1 |
| 11:03, 21 March 2014 | Range image borders.png (file) |  |
181 KB | Borders detected by PCL on a range image. | 1 |
| 11:02, 21 March 2014 | Range image border detection.png (file) |  |
243 KB | Example of border detection on range images (image taken from [http://www.willowgarage.com/sites/default/files/icra2011_3dfeatures.pdf original paper] by Bastian Steder et al.). | 1 |
| 12:38, 20 March 2014 | Range image planar.png (file) |  |
168 KB | Range image created from a point cloud, using planar projection. | 1 |
| 12:38, 20 March 2014 | Range image spherical.png (file) |  |
212 KB | Range image created from a point cloud, using spherical projection. | 1 |
| 12:24, 12 March 2014 | RIFT.png (file) |  |
58 KB | Computation of the Rotation Invariant Feature Transform (RIFT) descriptor, showing the resulting features at three points (image taken from [http://www.cs.illinois.edu/~slazebni/publications/pami05.pdf original paper]). | 1 |
| 12:43, 11 March 2014 | Spin images.png (file) |  |
218 KB | Example of spin images computed for 3 different points of a 3D model (image taken from thesis of Andrew Edie Johnson). | 1 |
| 09:57, 11 March 2014 | SHOT support structure.png (file) |  |
48 KB | Support structure (sphere) used to compute the Signature of Histograms of Orientations descriptor on a point, showing the division into bins. Only 4 azimuth subdivisions are shown for clarity, 8 are actually used (image taken from original paper by Fed... | 1 |
| 11:33, 5 March 2014 | 3DSC support structure.png (file) |  |
287 KB | Support structure (sphere) used to compute the 3D Shape Context descriptor on a point, showing the division into bins (image taken from original paper by Andrea Frome et al.) | 1 |
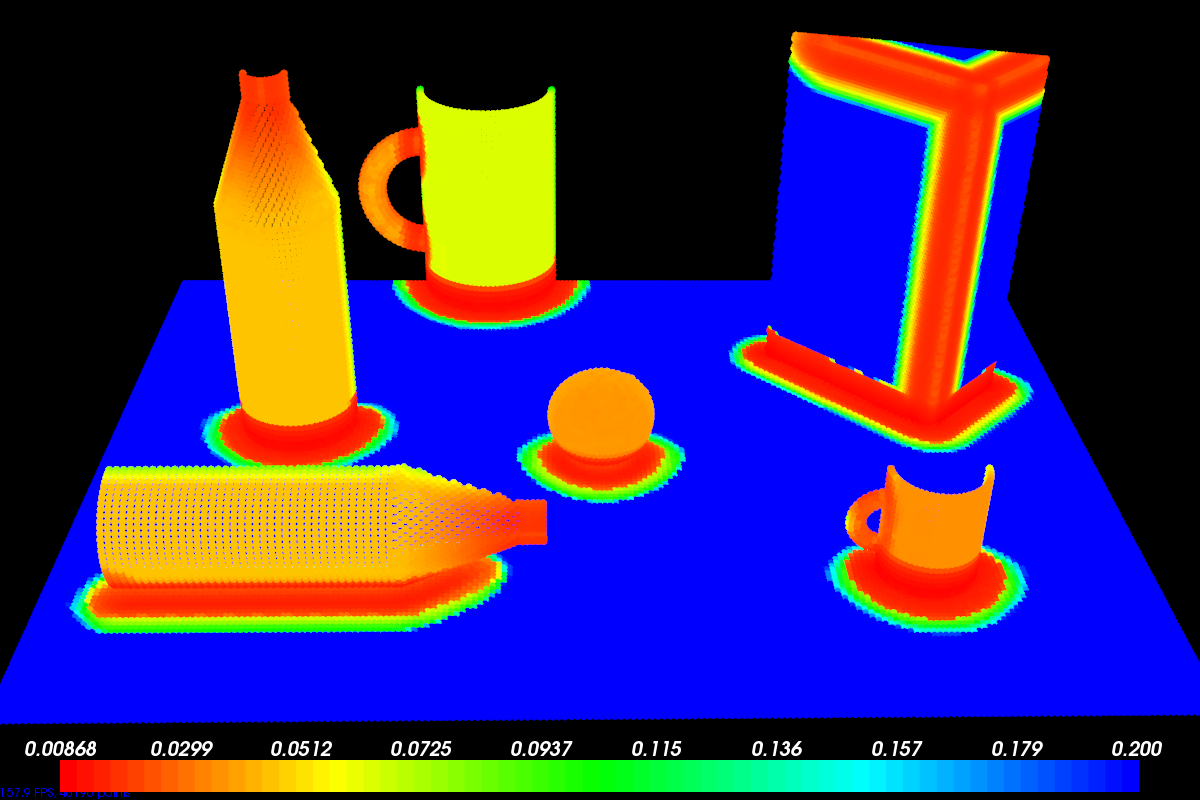
| 09:23, 5 March 2014 | RSD values.png (file) |  |
204 KB | Values of RSD descriptor for the points of a cloud. Points lying on a flat plane have the maximum possible sphere radius, points lying on a sphere or cylinder have the actual radius of the object (image taken from http://ias.in.tum.de/_media/events/rgb... | 1 |
| 09:22, 5 March 2014 | RSD sphere.png (file) |  |
14 KB | Sphere that fits two points with given normals, computed for the RSD descriptor (image taken from http://ias.in.tum.de/_media/events/rgbd2011/marton.pdf). | 1 |
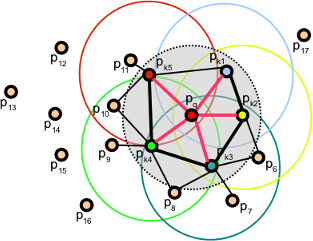
| 12:15, 4 March 2014 | PFH neighbors.png (file) |  |
17 KB | Example of how the point pairs that are computed for the PFH descriptor (image taken from http://pointclouds.org). | 1 |
| 12:14, 4 March 2014 | FPFH neighbors.png (file) |  |
46 KB | Example of how the point pairs that are computed for the FPFH descriptor (image taken from http://pointclouds.org). | 1 |
| 11:40, 27 February 2014 | PFH frame.png (file) |  |
26 KB | Fixed coordinate frame and angular features computed for a pair of points, for the FPH descriptor (image taken from http://pointclouds.org). | 1 |
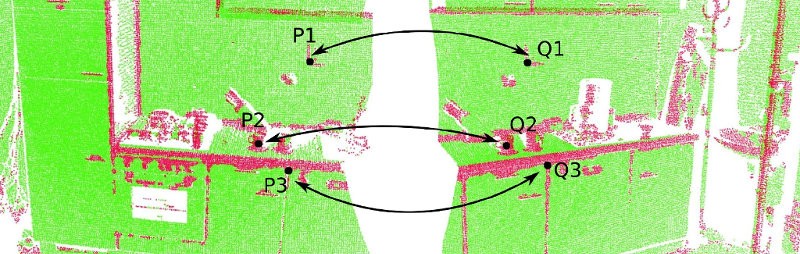
| 11:55, 25 February 2014 | Correspondence.jpg (file) |  |
94 KB | 3 point feature correspondences found between two clouds (image taken from http://pointclouds.org). | 1 |
| 10:50, 21 February 2014 | ConcaveHullAfter.png (file) |  |
12 KB | Concave hull computed for the table at https://github.com/PointCloudLibrary/data/blob/master/tutorials/table_scene_lms400.pcd | 1 |
| 10:49, 21 February 2014 | ConcaveHullBefore.png (file) |  |
113 KB | Point cloud scene of a table with an object on top, taken from the PCL dataset (https://github.com/PointCloudLibrary/data/blob/master/tutorials/table_scene_lms400.pcd). | 1 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
First page |
Previous page |
Next page |
Last page |